Humanoide Roboter im Unternehmenseinsatz: Hype oder echter Business-Case?
Humanoide Roboter spielen in Industrie, Forschung und Wirtschaft eine immer größere Rolle. Fortschritte in den Bereichen KI, Sensortechnologie und Robotik ermöglichen es, Maschinen an menschliche Bewegungen und Arbeitsumgebungen anzupassen. Für Unternehmen stellt sich die zentrale Frage: Sind humanoide Roboter ein kurzfristiger Technologietrend oder ein echter Business-Case für industrielle Anwendungen? Dieses Insight zeigt die Funktionsweise und die rechtlichen Anforderungen Humanoider Roboter für den industriellen Einsatz.
Inhaltsverzeichnis
Das Wichtigste in Kürze
- Humanoide Roboter sind menschenähnliche Maschinen, die auf Basis von Künstlicher Intelligenz, Sensorik und modernen Aktuatoren in der Lage sind, komplexe Tätigkeiten in menschlichen Umgebungen auszuführen.
- Vor ihrem Einsatz müssen Unternehmen rechtliche Anforderungen aus KI-Regulierung, Sicherheitsnormen und Produkthaftung frühzeitig berücksichtigen.
- Für Unternehmen gilt: humanoide Roboter bieten echtes Potenzial für Anwendungen in Fertigung, Logistik und Service. Eine erfolgreiche Einführung erfordert jedoch frühzeitige Auseinandersetzung mit technischen Möglichkeiten, regulatorischen Anforderungen und wirtschaftlicher Tragfähigkeit.
Was sind humanoide Roboter: Anatomie trifft Algorithmus
Humanoide Roboter sind Maschinen, deren Aufbau und Bewegungsweise am menschlichen Körper orientiert sind. Dies ermöglicht Robotern, Werkzeuge zu bedienen, Treppen zu steigen und sich in komplexen Umgebungen anpassen zu können. Durch Fortschritte in der Künstlichen Intelligenz, Sensorik und Aktorik sind humanoide Roboter zunehmend in der Lage, komplexe Aufgaben selbstständig auszuführen und auf unterschiedlichste Situationen zu reagieren.
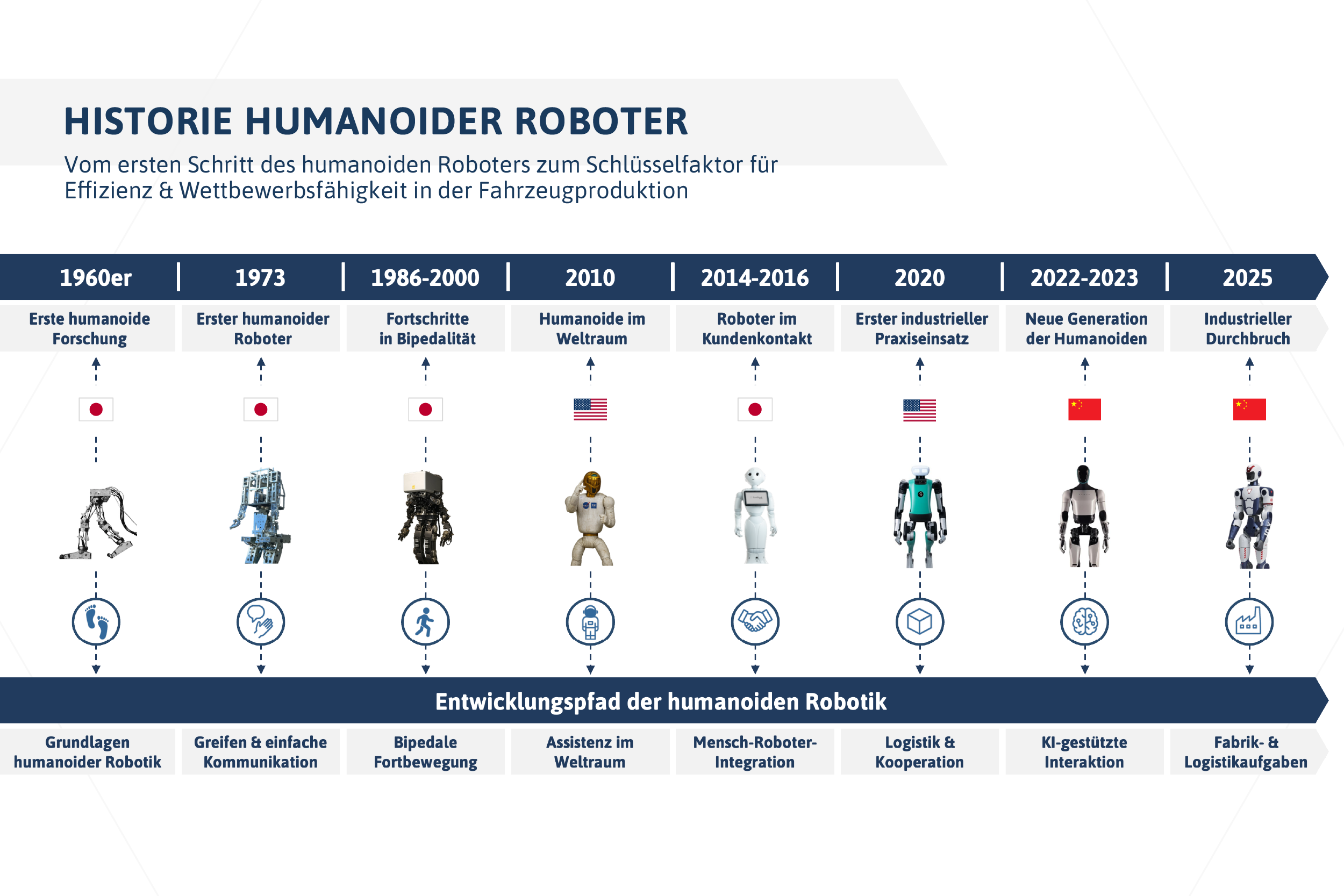
Geschichte: Evolution des menschlichen Roboters
Die Idee von menschenähnlichen Maschinen reicht weit zurück. Bereits im 15. Jahrhundert entwarf Leonardo da Vinci einen mechanischen Automaten [1]. Der Begriff „Roboter“ wurde später im Jahr 1921 vom Schriftsteller Karel Čapek geprägt [2].
Die technische Entwicklung der modernen Humanoiden Robotik begann jedoch erst im 20. Jahrhundert und hat sich in den letzten Jahren deutlich beschleunigt. Fortschritte in der Robotik, Sensortechnologie und Künstlichen Intelligenz ermöglichen zunehmend komplexe Bewegungen und Integrationen.
Der folgende Überblick zeigt die wichtigsten Meilensteine von humanoiden Robotern, von den ersten Forschungsprojekten bis hin zu aktuellen industriellen Anwendungen [3]. Die Länderflagge kennzeichnet dabei jeweils das Herkunftsland des Herstellers oder der entwickelnden Forschungseinrichtung.
Abgrenzung zu anderen Robotertypen
Industrieroboter, Service-Roboter und Androide verfolgen jeweils unterschiedliche Designziele und Einsatzkontexte. Für Unternehmen ist diese Abgrenzung relevant, da sie die Grundlage bildet, um die richtige Technologie für den jeweiligen Einsatzbereich zu identifizieren.
Industrieroboter
Industrieroboter zählen heutzutage zu den wichtigsten Technologien in der industriellen Automatisierung. In einigen Betrieben übernehmen sie wiederkehrende Aufgaben, welche hohe Präzision erfordern, wie beispielsweise das Schweißen, Montieren oder Lackieren von Bauteilen. Sie operieren in der Regel in streng abgegrenzten Arbeitsbereichen ohne direkte Interaktion mit Menschen.
Im Gegensatz zu humanoiden Robotern sind Industrieroboter nicht für flexible Umgebungen ausgelegt und benötigen fest definierte Produktionsprozesse [4].
Definition (ISO 8373:2021, 2.9) “Automatisch gesteuerter, reprogrammierbarer, vielseitiger Manipulator, programmierbar in drei oder mehr Achsen, der entweder fest installiert oder mobil für den Einsatz in Anwendungen der industriellen Automatisierung sein kann.“
Service-Roboter
Unter die Aufgaben der Service-Roboter zählt die Unterstützung von Menschen in Alltags- und Dienstleistungsumgebungen, wie etwa in der Pflege, im Einzelhandel oder in der Hotellerie. Sie müssen hohe Anforderungen an Sicherheit und soziale Kompatibilität erfüllen, da sie direkt mit Menschen interagieren [5].
Definition (ISO 8373:2021, 2.10) „Ein Roboter, der nützliche Aufgaben für Menschen oder Geräte ausführt, mit Ausnahme von Anwendungen der industriellen Automatisierung.“
Androiden vs. Humanoide
Die Begriffe „Android“ und „Humanoid“ werden häufig gleichgesetzt, bezeichnen jedoch unterschiedliche Konzepte.
Androide Roboter sind möglichst naturgetreue Nachbildungen des Menschen. Ihr äußeres Erscheinungsbild, sowie Gesichtsausdrücke werden möglichst realistisch dargestellt. Bei humanoiden Robotern liegt der Fokus stärker bei der menschlichen Körperstruktur und Bewegungslogik, ohne dabei zwingend den Menschen genau zu verkörpern. Ihre Bauweise soll ihnen ermöglichen, sich in Umgebungen zu bewegen, die ursprünglich für Menschen gestaltet wurden.
Im industriellen Kontext liegt der Fokus bei humanoiden Robotern, da Funktionalität und Zuverlässigkeit Vorrang vor realistischem Aussehen haben [6].
Rechtlicher Rahmen und Regulierung
Um einen humanoiden Roboter einsetzen zu können, müssen vorher diverse rechtliche Anforderungen geprüft und erfüllt werden. Sowohl auf EU-Ebene als auch durch internationale Normen bestehen verbindliche Regelungen, die Unternehmen bei der Planung und Einführung berücksichtigen müssen. Eine mögliche Annäherung an die rechtlichen Anforderungen bieten drei Bereiche: die KI-Regulierung, die Sicherheitsanforderungen und die Haftung.
KI-Regulierung in der EU
In der Europäischen Union gilt seit 2024 der EU AI Act, der verbindliche Regeln für den Einsatz von KI-Systemen vorgibt. KI-Systeme werden je nach Risiko für Menschen, Sicherheit und Grundrechte unterschiedlich eingestuft. Je höher das Risiko eines Systems ist, desto strengere Anforderungen gelten für dessen Entwicklung und Einsatz. Unternehmen, die humanoide Roboter einführen wollen, müssen diese regulatorischen Vorgaben frühzeitig in ihre Planung einbeziehen [7].
Sicherheitsanforderungen
Humanoide Roboter, die in Umgebungen mit Menschen zum Einsatz kommen, müssen hohe Sicherheitsanforderungen erfüllen. Relevante Normen wie ISO 10218-1 und ISO 10218-2 legen Sicherheitsanforderungen für Industrieroboter fest, darunter zählen Notabschaltfunktionen, Geschwindigkeitsüberwachungen und Kraftgrenzen bei Mensch-Roboter-Kontakt [8]. Darüber hinaus müssen Systeme für den Einsatz in öffentlichen Räumen oder mit direkten Menschenkontakt spezifische CE-Kennzeichnungsverfahren durchlaufen und nachweisen, dass alle relevanten Sicherheitsnormen eingehalten werden. [9]
Haftungsfragen
Die Haftung bei Schäden, die durch autonome Robotersysteme verursacht werden, wird durch die klarer geregelt als bisher. Nun fallen, durch die Erweiterung des Begriffes Software und KI-Systeme, auch Humanoide Roboter unter die Produkthaftung. Daher haften Hersteller für Schäden, die durch fehlerhafte Systeme verursacht werden.
Gerade bei autonomen Funktionen bleibt die Zuordnung von Verantwortung jedoch komplex, da die Fehler sowohl in der Hardware, als auch in der Software auftreten können. Daher sollten Unternehmen bei der Einführung humanoider Roboter bereits von Beginn an vertragliche Haftungsregelungen mit Herstellern und Systemintegratoren klar definieren. [10]
Einen praxisnahen Überblick über die regulatorischen Anforderungen bietet das EFS Consulting Whitepaper zu dem Cyber Resilience Act & EU Maschinenverordnung.
Wie humanoide Roboter technisch funktionieren
Das Verständnis der technischen Grundlagen humanoider Roboter ist für Unternehmen essenziell, um deren Potenziale realistisch einschätzen zu können. Humanoide Roboter werden als vielseitige Systeme verstanden, die auf menschlicher Bewegungsmechanik basieren und darauf ausgelegt sind, in dynamischen Umgebungen auf Veränderung zu reagieren [11].
Hardware-Komponenten
Die Hardware humanoider Roboter besteht aus mehreren eng miteinander verknüpften Komponenten. Das mechanische Grundgerüst, besteht aus Körperstruktur, Gelenken und Aktuatoren und bilden die Basis für Bewegungsabläufe. Aktuatoren funktionieren dabei als Antriebselemente und ermöglichen gezielte Bewegungen der einzelnen Gelenke. Für die Verarbeitung der Daten und Steuerung in Echtzeit, wird das System durch Sensoren und Recheneinheiten ergänzt. Erst das Zusammenspiel dieser Komponenten ermöglicht den zuverlässigen Betrieb humanoider Roboter in realen Einsatzbereichen [12].
Sensorik
Die Sensorik humanoider Roboter bildet eine zentrale Grundlage für ihre Funktionsfähigkeit und lässt sich in zwei Kategorien unterteilen: (1) propriozeptive Sensoren und (2) exterozeptive Sensoren.
- Propriozeptive Sensoren erfassen Informationen aus dem Inneren des Systems, wie Gelenkposition, Geschwindigkeit oder Beschleunigung und sind entscheidend für Stabilität, Gleichgewicht und genaue Bewegungssteuerung.
- Exterozeptive Sensoren hingegen nehmen Informationen aus der Umgebung auf, wie Kameras, LiDAR-Systeme und taktile Sensoren.
Beide Sensortypen liefern gemeinsam die Datenbasis für Aufgaben wie Navigation, Objekterkennung und Manipulation [13].
Aktoren und Bewegungsmechanik
Aktuatoren sind die Muskeln humanoider Roboter, diese wandeln elektrische Energie in gezielte Gelenkbewegungen um und bestimmen, wie präzise und sicher ein System funktioniert. Serielle elastizitäts-Aktuatoren (SEAs) federn Stöße ab und verbessern die Kraftkontrolle. Variable Steifigkeits-Aktuatoren (VSAs) passen die mechanische Steifigkeit dynamisch an die jeweilige Aufgabe an. Für präzise Griff- und Armbewegungen kommen zusätzliche BLDC-Motoren zum Einsatz. [14]
Energieversorgung
Die Energieversorgung zählt zu den zentralen Planungsgrößen im Praxiseinsatz humanoider Roboter. Aktuelle Systeme nutzen überwiegend Lithium-Ionen-Akkus, deren Betriebsdauer stark vom Einsatzprofil abhängt. Hochdynamische Bewegungsabläufe und schwere Nutzlasten können die Laufzeit um einiges reduzieren, während leichtere Servicearbeiten mehrere Stunden Betrieb ermöglichen. In Szenarien mit Schichtbetrieb bleibt die Energieversorgung daher noch kritisch. Lösungsansätze wie Akku-Wechselsysteme oder Solid-State-Batterien mit höherer Energiedichte sind in der Entwicklung. [15]
Software und KI
Die Hardware eines humanoiden Roboters ist nur so leistungsfähig wie die Software, die sie steuert. Die Softwarearchitektur entscheidet darüber, wie flexibel, autonom und lernfähig ein System in der Praxis agiert. Drei Schichten sind dabei zentral:
- das Middleware-Framework (ROS)
- KI-Modelle für die Wahrnehmung
- die Bewegungsplanung.
Robot Operating System (ROS)
Die Robot Operating System (ROS) hat sich als de-facto-Standard-Middleware in der Robotik etabliert. Es handelt sich dabei nicht um ein klassisches Betriebssystem, sondern um ein modulares Framework zur Koordination verteilter Softwarekomponenten wie Sensorik, Steuerung und Aktuatorik. Mit ROS 2 wurden gezielt Einschränkungen von ROS 1 adressiert, u. a. durch verbesserte Echtzeit-Fähigkeit, Unterstützung verteilter Systeme sowie erweiterte Sicherheitsmechanismen. Die modulare Architektur ermöglicht das unabhängige Testen und den Austausch einzelner Komponenten. [16]
KI-Modelle für Wahrnehmung
Moderne humanoide Roboter nutzen Deep-Learning-Modelle zur Verarbeitung von Sensordaten, insbesondere für visuelle Wahrnehmung, Objekterkennung und Szenenverständnis. Dabei werden Informationen aus unterschiedlichen Sensorsystemen wie Kameras und weiteren Umgebungssensoren kombiniert, um ein konsistentes Bild der Umgebung zu erzeugen. Lernbasierte kognitive Architekturen ermöglichen es den Systemen, Wahrnehmung und Entscheidungsfindung enger zu koppeln. Mit zunehmender Autonomie und Systemintelligenz steigen jedoch die Anforderungen an Robustheit, Zuverlässigkeit und Nachvollziehbarkeit, insbesondere im industriellen Einsatz. [17]
Bewegungsplanung
Die Bewegungsplanung bestimmt, wie ein Roboter, unter Berücksichtigung von Hindernissen und dynamischen Umgebungsveränderungen, sicher und effizient von einem Zustand zum nächsten gelangt. Klassische Verfahren wie das Zero-Moment-Point-Modell (ZMP) oder Model Predictive Control (MPC) sind präzise, aber rechenintensiv. Zunehmend ergänzen lernbasierte Ansätze wie Reinforcement Learning (RL) und Imitation Learning diese Methoden. Roboter erlernen Bewegungsstrategien im Simulator und übertragen sie auf die reale Welt (Sim-to-Real-Transfer). [18]
Herausforderungen und Compliance
Der Einsatz humanoider Roboter bringt nicht nur technisches Potenzial mit sich, sondern er stellt Unternehmen auch vor konkrete Herausforderungen. Hardware-seitige Zielkonflikte, Sicherheitsanforderungen in der Mensch-Roboter-Kollaboration, IT-Infrastruktur und wirtschaftliche Tragfähigkeit müssen von Beginn an mitgedacht werden.
Hardware-Trilemma: Feinmotorik, Autonomie & Energie
Humanoide Roboter stehen vor einem strukturellen Zielkonflikt zwischen Feinmotorik, Autonomie und Energieeffizienz. Hochpräzise Greif- und Bewegungsabläufe erfordern leistungsstarke Aktuatoren und erhöhen den Energieverbrauch. Zusätzliche Rechenleistung für Wahrnehmung und autonome Entscheidungsfindung belastet den Akku weiter. Gleichzeitig muss das System mechanisch stabil und ausgewogen bleiben, um in realen, teils unebenen Umgebungen sicher zu operieren. Die heute verfügbaren Energiesysteme begrenzen die Einsatzdauer deutlich und erschweren einen durchgängigen Schichtbetrieb. Für einen wirtschaftlichen Einsatz müssen Unternehmen daher frühzeitig festlegen, welche dieser Dimensionen für ihren Anwendungsfall priorisiert wird. [19]
Safety First: Mensch-Roboter-Kollaboration
Mobile humanoide Roboter stellen neue Anforderungen an die Sicherheitsarchitektur industrieller Produktionsumgebungen. Die Normen Sicherheitsanforderungen speziell für den industriellen Einsatz humanoider Roboter adressiert. Da es kein Einheitskonzept gibt, muss für jeden Einsatzfall eine eigene Risikoanalyse durchgeführt und ein maßgeschneidertes Sicherheitskonzept entwickelt werden, technisch wie organisatorisch. [20]
IT-Architektur: Das Rückgrat der Roboter-Flotte
Humanoide Roboter sind vernetzte Datenproduzenten: Kameras, LiDAR und KI-Modelle erzeugen kontinuierlich massive Datenströme. Klassische WLAN-Infrastrukturen stoßen bei sicherheitsrelevanter Robotersteuerungen an ihre Grenzen, da Latenz und Verfügbarkeit nicht deterministisch sind. Private 5G-Netze ermöglichen hingegen niedrige, planbare Latenzen im einstelligen Millisekundenbereich und gelten als bevorzugte Infrastruktur für den Flächeneinsatz. Ergänzend erlaubt Edge Computing die lokale Verarbeitung rechenintensiver Aufgaben direkt in der Produktionshalle, wodurch Latenz, Bandbreitenbedarf und Datenschutzrisiken reduziert werden. Die IT- und Kommunikationsinfrastruktur ist damit eine zentrale Grundvoraussetzung für den industriellen Einsatz humanoider Roboter. [21]
Ethische und rechtliche Aspekte im Betrieb
Der Einsatz humanoider Roboter ist nicht nur eine technische Entscheidung, er berührt auch den Betriebsalltag und die Menschen darin. In Österreich hat der Betriebsrat gemäß . In Deutschland gilt entsprechend das Betriebsverfassungsgesetz (BetrVG), das dem Betriebsrat ebenfalls ein Mitbestimmungsrecht bei der Einführung technischer Systeme einräumt. Auf EU-Ebene kommen DSGVO und EU AI Act hinzu, sobald Systeme personenbezogene Daten verarbeiten oder als Hochrisiko-KI eingestuft werden. Daneben stellt sich auch die Frage: Wie reagieren Mitarbeitende auf Maschinen, die ihnen in Bewegung und Entscheidung ähneln? Im industriellen Kontext wird deshalb bewusst auf Funktionalität statt auf möglichst menschliches Aussehen gesetzt. [22]
Die Ökonomie der Skalierung: ROI jenseits der Anschaffungskosten
Neben den technischen und regulatorischen Aspekten stellt sich für Unternehmen früh die entscheidende Frage: Wann lohnt sich der Einsatz humanoider Roboter wirtschaftlich und unter welchen Bedingungen? Entscheidend ist dabei nicht der Anschaffungspreis allein, derzeit zwischen 50.000 und 250.000 Euro je nach System, sondern die Total-Cost-of-Ownership (TCO). Sie umfasst Wartung, Software-Updates, Infrastrukturkosten, Schulungsaufwand und Ausfallzeiten. Ein wachsendes Gegenmodell ist Robotics-as-a-Service (RaaS). Anstatt hoher Investitionskosten (CapEx) zahlen Unternehmen eine nutzungsbasierte Gebühr (OpEx). Das senkt die Einstiegshürde und macht humanoide Roboter auch für den Mittelstand zugänglich. Der ROI hängt stark vom Einsatzbereich ab, repetitive und körperlich belastende Tätigkeiten mit hoher Varianz bieten das größte Einsparpotenzial. [23]
Einsatzgebiete & Wirtschaftlichkeit: Von der Halle in die Wertschöpfungskette
Industrielle Umgebungen sind derzeit der realistischste Einstiegspunkt für humanoide Roboter. Sie eignen sich besonders gut für Produktionsumgebungen, die für eine klassische Automatisierung zu komplex oder zu kostspielig umzubauen wären. Während starre Automatisierungslösungen oft maßgeschneiderte Infrastruktur voraussetzen, bringen humanoide Roboter eine entscheidende Flexibilität mit. Sie fügen sich in bestehende Abläufe ein, ohne die Halle neu gestalten zu müssen. Innerhalb der Wertschöpfungskette zeigt sich das Potenzial vor allem dort, wo klassische Automatisierungen an ihre Grenzen stoßen.
Intralogistik und Montage
In der Intralogistik und Montage bieten humanoide Roboter einen entscheidenden Vorteil gegenüber klassischen Automated Guided Vehicles (AGVs). Während AGVs auf ebene, markierte Wege angewiesen sind, können humanoide Roboter Treppen steigen, enge Gänge durchgehen und in Umgebungen agieren, die für Menschen gebaut wurden. Sortier- und Transportaufgaben, die zu variabel für starre Automatisierung und zu repetitiv für Fachkräfte sind, stellen den idealen Einstieg dar. [24]
Gefährliche Umgebungen
Deutlicher wird der Vorteil humanoider Roboter in Umgebungen, die für Menschen mit gesundheitlichen Risiken verbunden sind. Extreme Temperaturen, chemische Belastungen, enge Räume oder Strahlungsexposition sind Bedingungen, unter denen humanoide Roboter Wartungs- und Inspektionsaufgaben übernehmen können. Die Risikominimierung für Mitarbeitende ist dabei nicht nur ein Sicherheitsargument, sondern gewinnt auch im Rahmen von ESG-Strategien an Bedeutung. [25]
Healthcare und Service
Im Gesundheits‑ und Servicebereich liegt das Potenzial humanoider Roboter insbesondere in der Unterstützung und Entlastung bei körperlich und organisatorisch belastenden Tätigkeiten. Studien und Pilotanwendungen, vor allem in Ostasien, zeigen, dass humanoide und sozial interaktive Roboter bereits heute für ausgewählte Assistenz‑ und Front‑Desk‑Funktionen eingesetzt werden. Der Fokus liegt dabei weniger auf vollständiger Automatisierung als auf der Ergänzung menschlicher Arbeit durch unterstützende und interaktive Systeme. [26]
Pilotprojekte in der Automotive Branche
Die Automobilindustrie macht es vor: BMW setzte Figure AI’s Figure 02 in Spartanburg, South Carolina ein. Der Auftrag war es, Blechteile präzise zu entnehmen und für den Schweißprozess zu positionieren. Innerhalb von zehn Monaten unterstützte der Roboter die Produktion von über 30.000 BMW X3, absolvierte rund 1.250 Betriebsstunden und bewegte mehr als 90.000 Teile pro Schicht. Seit Anfang 2026 läuft das erste europäische Folgeprojekt im Werk Leipzig [27].
Mercedes-Benz testet parallel Apollo von Apptronik am Digital Factory Campus in Berlin-Marienfelde. Der Roboter übernimmt dort Intralogistik-Aufgaben. Er transportiert Bauteile zur Produktionslinie und führt gleichzeitig Qualitätskontrollen durch [28].

Der Business Case: Warum sich das Warten nicht mehr lohnt
Die Frage ist nicht mehr ob humanoide Roboter wirtschaftlich sinnvoll sein können, sondern unter welchen Bedingungen. Um den wirtschaftlichen Nutzen greifbar zu machen, lässt sich folgendes Szenario betrachten:
In der Endmontage müssen Bauteile wiederholt zwischen zwei Stationen transportiert werden. Mitarbeitende legen dabei 30 bis 60 Meter pro Zyklus zurück, eine repetitive Aufgabe mit hohem Unterbrechungspotenzial für wertschöpfende Tätigkeiten. Genau hier kann ein humanoider Roboter ansetzen. Er nutzt bestehende Wege und Rampen, erfordert keine Infrastrukturänderungen und übernimmt den Transport autonom. Das Ergebnis: stabilisierter Materialfluss, kürzere Wartezeiten und entlastete Mitarbeitende, die sich auf komplexere Aufgaben konzentrieren können.
Kompensation des Fachkräftemangels
Humanoide Roboter sind weniger eine Antwort auf den Fachkräftemangel als auf die demografische Lücke bei repetitiven, körperlich belastenden Tätigkeiten. Mit einer Betriebszeit von rund 5250 Stunden pro Jahr kann ein humanoider Roboter in Europa je nach System zwischen 1,6 und 7,9 Vollzeitäquivalente bei Transportaufgaben ersetzen. Dies hängt von System, Einsatzprofil und Schichtmodell ab. Die Amortisationszeit hängt dabei stark von Systempreis, Lohnkosten und Use Case ab und ist je nach Konstellation in unter zwei Jahren erreichbar.
Automatisierung komplexer Tätigkeiten
Neben den Kosten ist vor allem die technische Weiterentwicklung entscheidend. Moderne KI-Modelle ermöglichen humanoiden Robotern zunehmend variable Aufgaben, die für klassische Automatisierung zu komplex sind. Anders als starre Industrieroboter reagieren sie flexibler – ein klarer Vorteil in dynamischen Produktionsumgebungen.
Markt-Radar: Die wichtigsten Player im Vergleich
Der Markt für humanoide Roboter entwickelt sich rasant – von Forschungsplattformen bis zu ersten kommerziell einsetzbaren Systemen. Für Unternehmen, die einen Einstieg in die Technologie erwägen, ist ein fundierter Überblick über die wichtigsten Anbieter, ihrer Stärken und ihren Reifegrad entscheidend, um die richtige Wahl für den jeweiligen Einzelfall zu treffen.
Warum es jetzt darauf ankommt: Future Ready Competitiveness
Die Automobilindustrie steht unter Druck: Sinkende Nachfrage senkt die Auslastung, Produktionsnetzwerke werden konsolidiert und Werksschließungen verursachen hohe Kosten. Der Bedarf an flexiblen Produktivitätslösungen wächst.
Humanoide Roboter bieten hier einen konkreten Ansatz: Standorte lassen sich zunehmend unabhängig vom lokalen Lohnkostenniveau betreiben und in Netzwerkentscheidungen neu bewerten. Produktionskapazitäten können flexibel skaliert werden, ohne den Aufbau starrer Infrastrukturen. Restrukturierungskosten lassen sich durch gezielte Standorttransformationen reduzieren. Darüber hinaus ermöglichen intelligente Systeme, kritisches Fertigungs-Know-how im Unternehmen zu verankern, anstatt es mit dem Ausscheiden erfahrener Mitarbeitenden zu verlieren.
Humanoide Roboter schaffen damit nicht nur operative Effizienz, sondern auch die Grundlage für zukunftsfähige Produktionsstrukturen.
Markt Radar Humanoide Roboter
Diese Übersicht zeigt einen aktuellen Auszug der relevantesten humanoiden Roboter und vergleicht zentrale Leistungsparameter wie Geschwindigkeit, Akkulaufzeit und KI-Anteil. Sie gibt einen kompakten Einblick in den technologischen Reifegrad und die unterschiedlichen Einsatzschwerpunkte – von industrieller Nutzung bis hin zu skalierbaren General-Purpose-Systemen.
| Roboter | Hersteller | Speed (m/s) | Akku (h) | KI (%) | Besonderheit |
| Optimus | Tesla (USA) | 2.2 | 4 | 80 | Massenproduktion angestrebt, FSD-KI, Tesla-intern |
| Figure 02 | Figure AI (USA) | 1.2 | 5 | 90 | BMW-Partnerschaft, multimodale KI, industriell |
| Forerunner | Kepler Robotics (CHN) | 1.1 | 8 | 85 | 8h Laufzeit, 8000N Planetenrollenaktuatoren |
| Digit | Agility Robotics (USA) | 1.5 | 4 | 75 | Lagerlogistik optimiert, RaaS-Modell |
| Apollo | Approtronik (USA) | 1.2 | 4 | 80 | Industriefokus, modulare Bauweise, robust |
| Atlas | Boston Dynamics (USA) | 2.5 | 1 | 90 | Höchste Beweglichkeit, Forschung & High-Motion |
| Phoenix | Sanctuary AI (CAN) | 1.3 | 4 | 85 | Übernimmt mehrere Aufgaben statt Mitarbeitenden |
| G1 | Unitree (CHN) | 2.5 | 2 | 70 | Günstigster Vollhumanoid, kompakt & faltbar |
EFS Consulting Expert:innen Ausblick: Was bedeutet das für Unternehmen?
Humanoide Roboter befinden sich aktuell noch in einer frühen, aber technologisch dynamischen Entwicklungsphase. Fragen rund um Zuverlässigkeit, Energieeffizienz und Skalierbarkeit sind noch nicht abschließend gelöst und somit ist ein breiter industrieller Einsatz noch ausstehend [12]. Erste Pilotprojekte aus Produktion und Logistik zeigen jedoch, dass das Potenzial der Technologie real ist und nicht nur theoretisch. [29]
Es stellt sich daher nicht mehr die Frage, ob humanoide Roboter kommen, sondern vielmehr, wann und in welchem Ausmaß. Wer heute damit beginnt, geeignete Prozesse zu identifizieren, regulatorische Vorgaben zu verstehen und das nötige interne Know-how aufzubauen, schafft sich einen Vorsprung, der sich später kaum aufholen lässt.
Daraus ergeben sich wichtige Erkenntnisse aus Unternehmersicht: Humanoide Roboter sind kein kurzfristiger Hype, aber auch noch kein ausgereiftes Massenprodukt. Sie befinden sich in einem Übergang, mit greifbaren Anwendungsfeldern, zunehmendem Investitionsinteresse und einem regulatorischen Umfeld, das sich schrittweise konkretisiert. Für Unternehmen, die langfristig wettbewerbsfähig bleiben wollen, lohnt es sich diesen Übergang aktiv zu begleiten, anstatt nur abzuwarten.
Wer dabei auf einen erfahrenen Partner setzt, kann diesen Prozess gezielter und effizienter gestalten. EFS Consulting begleitet Unternehmen dabei, diese Entwicklung strukturiert zu verfolgen, relevante Einsatzbereiche zu identifizieren und sich frühzeitig zu positionieren, bevor es andere tun.
EFS-Expertise: Warum EFS Consulting der richtige Partner ist
Mehr als 30 Jahre gebündeltes Automotive-Know-How, gewachsen in der Zusammenarbeit mit führenden OEMs und Zulieferern.
Cross-funktionale Teams, die Pilotprojekte nicht nur konzipieren, sondern zuverlässig zum Laufen bringen.
Pragmatische, kundenorientierte Lösungen, mit dem klaren Anspruch, schnell messbaren Mehrwert zu liefern.
Im Kontext humanoider Roboter kommt ein Jahr intensiver Markt- und Technologiebegleitung hinzu: ein klares Bild der aktuellen Herausforderungen, ein realistischer Blick auf Lösungspfade und Konzepte, die unter echten Bedingungen funktionieren, nicht nur im Labor.
EFS Consulting Leistungen
EFS Consulting begleitet Unternehmen entlang eines strukturierten Drei-Phasen-Ansatzes:
- Operative Einsatzbereiche werden analysiert und der Markt systematisch bewertet, von technischer Reife über regulatorische Anforderungen bis hin zu wirtschaftlicher Tragfähigkeit.
- Die Beschaffungsvorbereitung steht im Mittelpunkt: Anbieterauswahl, Systemanforderungen und organisatorische Readiness.
- Überführung der Erkenntnisse in ein konkretes Pilot- und Implementierungskonzept, abgestimmt auf die spezifischen Produktions- und Logistikprozesse des Unternehmens.
Fazit
Humanoide Roboter sind keine Zukunftsvision mehr, sie sind eine Technologie, die gerade den Sprung aus dem Labor in die Realität vollzieht. Wer heute die richtigen Grundlagen legt, wird diesen Wandel gestalten statt reagieren. EFS Consulting begleitet Unternehmen auf diesem Weg: von der ersten Orientierung über die Bewertung konkreter Einsatzszenarien bis hin zur strukturierten Pilotplanung. Der nächste Schritt liegt bei Ihnen.
Kontaktieren Sie EFS Consulting für eine unverbindliche Ersteinschätzung und erfahren Sie, ob und wo humanoide Roboter in Ihrer Wertschöpfungskette heute schon einen konkreten Mehrwert schaffen könnte!
FAQs
Was können humanoide Roboter?
Transportieren, greifen, inspizieren und einfache Montageaufgaben ausführen, in Umgebungen, die für Menschen gebaut wurden.
Wo werden humanoide Roboter eingesetzt?
Aktuell vor allem in Fertigung und Intralogistik. Erste Pilotprojekte gibt es in Automotive, Lagerhaltung und dem Servicebereich.
Wie teuer sind humanoide Roboter?
Je nach System zwischen 16.000 und 350.000 Euro. Alternativ sind RaaS-Modelle mit monatlicher Nutzungsgebühr verfügbar.
Quellenverzeichnis
[1] Publika, L. (2025, 22. Dezember). Leonardo da Vinci’s Robots and Their Modern-Day Influence. ARTpublika Magazine. https://www.artpublikamag.com/post/leonardo-da-vincis-robots-and-their-modern-day-influence
[2] PRAG BESUCHEN. (2025, 30. Dezember). Karel Capek.
https://www.prag-besuchen.de/persoenlichkeiten/karel-capek/
[3] (2024). THE HISTORY OF Humanoid ROBOTS IN 2024 – Ver 1.0. https://www.merphi.se/wp-content/uploads/2024/11/History-of-Humanoid-robots-poster_MERPHI_2024_Ver1.2.pdf
[4] IFR International Federation of Robotics. (2024). Industrial Robots – Definition. International Federation of Robotics
[5] IFR International Federation of Robotics. (2025). World Robotics 2025 report – SERVICE ROBOTS. World Robotics 2025 report – SERVICE ROBOTS – released by IFR – International Federation of Robotics
[6] Holland, O. (2016). How people perceive different robot types. IEEE International Conference on Robotics and Biomimetics (ROBIO) (PDF) How people perceive different robot types: A direct comparison of an android, humanoid, and non-biomimetic robot
[7] European Union. (2024). Regulation (EU) 2024/1689 laying down harmonised rules on artificial intelligence (Artificial Intelligence Act) Regulation – EU – 2024/1689 – EN – EUR-Lex
[8] International Organization for Standardization. (2025). Robotics – Safety requirements, Part 1: Industrial robots (ISO 10218-1:2025).ISO 10218-1:2025(en), Robotics — Safety requirements — Part 1: Industrial robots
International Organization for Standardization. (2025). Robotics – Safety requirements, Part 2: Industrial robot applications and robot cells (ISO 10218-2:2025). ISO 10218-2:2025(en), Robotics — Safety requirements — Part 2: Industrial robot applications and robot cells
[9] European Union. (2023). Regulation (EU) 2023/1230 of the European Parliament and of the Council. Regulation – 2023/1230 – EN – EUR-Lex
[10] European Parliament and Council of the European Union. (2024). Directive (EU) 2024/2853 Richtlinie – 2024/2853 – EN – EUR-Lex
[11] IFR International Federation of Robotics. (2025) Humanoid robots: “Vision and reality”. Humanoid Robots: “Vision and Reality” Paper Published by IFR – International Federation of Robotics
[12] PubMed Central. (2023). Opportunities challenges and roadmap for humanoid robots in construction. Opportunities challenges and roadmap for humanoid robots in construction – PMC
[13] Roychoudhury et al. (2023). Perception for humanoid robots: A review. Perception for Humanoid Robots | Current Robotics Reports | Springer Nature Link
[14] Advancements in Humanoid Robots: A Comprehensive Review and Future Prospects
[15] Opportunities challenges and roadmap for humanoid robots in construction – PMC
[17] Advancements in Humanoid Robots: A Comprehensive Review and Future Prospects
[18] Advancements in humanoid robot dynamics and learning-based locomotion control methods
[19] Opportunities challenges and roadmap for humanoid robots in construction – PMC
[20] ISO/TS 15066:2016 – Robots and robotic devices — Collaborative robots
[21] Connected vehicles’ dynamic route planning based on reinforcement learning – ScienceDirect
[22] A&W-Blog | künstliche Intelligenz im Betrieb – Arbeit&Wirtschaft Blog
[23] Humanoid Robot ROI Guide [2026]
[25] Opportunities challenges and roadmap for humanoid robots in construction – PMC
[26] An Introduction to Robots and Artificial Intelligence for Healthcare in Japan and South Korea
[27] BMW Group to deploy humanoid robots in production in Germany for the first time
[29] Tong, Y., Liu, H., & Zhang, Z. (2024). Advancements in Humanoid Robots: A Comprehensive Review and Future Prospects. https://www.scribd.com/document/727344087/Advancements-in-Humanoid-Robots-A-Comprehensive-Review-and-Future-Prospects

Autoren





