Humanoid Robots in Enterprise Deployment: Hype or Real Business Case?
Humanoid robots are playing an increasingly important role in industry, research and business. Advances in AI, sensor technology and robotics are enabling machines to adapt to human movements and work environments. The central question for companies is: Are humanoid robots a short-term technology trend or a genuine business case for industrial applications? This insight examines the functionality and legal requirements of humanoid robots for industrial deployment.
Table of contents
Key Takeaways
- Humanoid robots are human-like machines, which, based on Artificial Intelligence, sensor technology and modern actuators are capable of performing complex tasks in human environments.
- Before deployment, companies must consider legal requirements from AI regulation, safety standards and product liability into account at an early stage.
- For companies: humanoid robots offer real potential for applications in manufacturing, logistics and services. A successful introduction, however, requires early engagement with technical capabilities, regulatory requirements and economic viability.
What Are Humanoid Robots: Anatomy Meets Algorithm
Humanoid robots are machines whose structure and movement are modeled on the human body. This enables robots to operate tools, climb stairs and adapt to complex environments. Through advances in Artificial Intelligence, sensor technology and actuator technology, humanoid robots are increasingly able to perform complex tasks autonomously and respond to a wide variety of situations
History: Evolution of the Human-Like Robot
The idea of human-like machines goes back a long way. As early as the 15th century, Leonardo da Vinci designed a mechanical automaton [1]. The term “robot” was later coined in 1921 by the writer Karel Čapek [2].
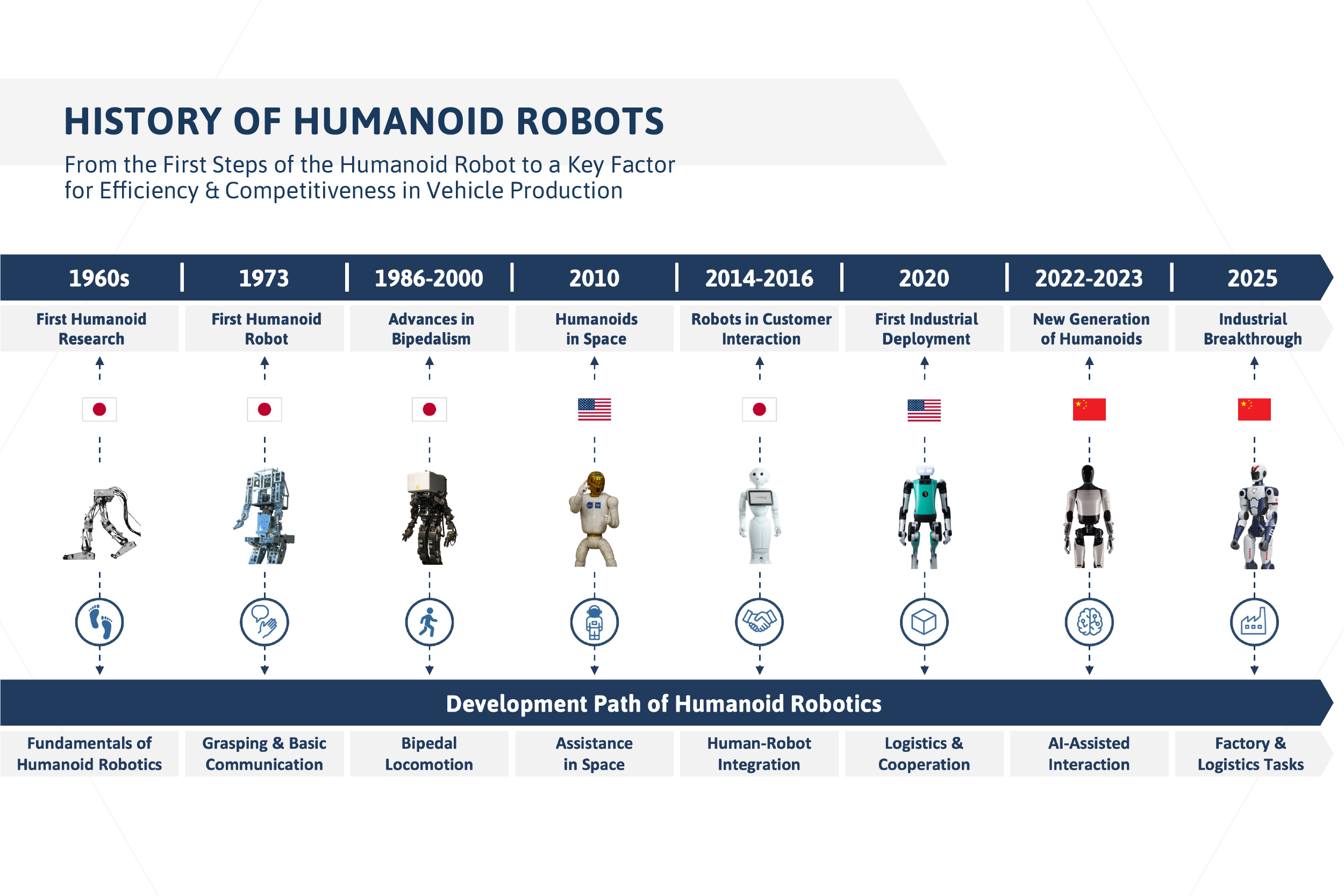
The technical development of modern humanoid robotics did not begin until the 20th century and has accelerated significantly in recent years. Advances in robotics, sensor technology and Artificial Intelligence are enabling increasingly complex movements and integrations.
The following overview shows the key milestones in humanoid robotics, from the first research projects to current industrial applications [3]. The country flag indicates the country of origin of the manufacturer or the developing research institution.
Distinction from Other Robot Types
Industrial robots, service robots and androids each pursue different design objectives and application contexts. This distinction is relevant for companies as it forms the basis for identifying the right technology for each area of application.
Industrial Robots
Industrial robots are today among the most important technologies in industrial automation. In some operations, they take on recurring tasks requiring high precision, such as welding, assembling, or painting components. They typically operate in strictly defined work areas without direct interaction with humans.
Unlike humanoid robots, industrial robots are not designed for flexible environments and require rigidly defined production processes [4].
Definition (ISO 8373:2021, 2.9) “Automatically controlled, reprogrammable, multipurpose manipulator, programmable in three or more axes, which can be either fixed in place or mobile for use in industrial automation applications.”
Service Robots
The tasks of service robots include the support of people in everyday and service environments, such as in healthcare, retail, or hospitality. They must meet high requirements for safety and social compatibility, as they interact directly with humans [5].
Definition (ISO 8373:2021, 2.10) “A robot that performs useful tasks for humans or equipment, excluding applications in industrial automation.”
Androids vs. Humanoids
The terms “android” and “humanoid” are often used interchangeably, but they refer to different concepts.
Android robots are as faithful replicas of humans as possible. Their external appearance and facial expressions are rendered as realistically as possible. For humanoid robots, the focus is more on the human body structure and movement logic, without necessarily resembling humans precisely. Their design is intended to allow them to move in environments originally designed for humans.
In an industrial context, the focus is on humanoid robots, as functionality and reliability take precedence over realistic appearance [6].
Legal Framework and Regulation
In order to deploy a humanoid robot, various legal requirements must be reviewed and fulfilled in advance. Both at the EU level and through international standards there are binding regulations that companies must take into account when planning and implementing deployments. A possible approach to the legal requirements is offered by three areas: AI regulation, safety requirements and liability.
AI Regulation in the EU
In the European Union, the EU AI Act has been in force since 2024, establishing binding rules for the deployment of AI systems. AI systems are classified differently depending on the risk to people, safety and fundamental rights. The higher the risk of a system, the stricter the requirements for its development and deployment. Companies wishing to introduce humanoid robots must incorporate these regulatory requirements into their planning at an early stage [7].
Safety Requirements
Humanoid robots deployed in environments alongside humans must meet high safety requirements. Relevant standards such as ISO 10218-1 and ISO 10218-2 define safety requirements for industrial robots, including emergency stop functions, speed monitoring and force limits during human-robot contact [8]. In addition, systems intended for use in public spaces or with direct human contact must undergo specific CE marking procedures and demonstrate that all relevant safety standards are being met. [9]
Liability Issues
Liability for damages caused by autonomous robotic systems is more clearly regulated than before by the Directive (EU) 2024/2853. Through the expansion of the term to include software and AI systems, Humanoid robots now also fall under product liability. Manufacturers are therefore liable for damages caused by defective systems.
Particularly with autonomous functions, the assignment of responsibility remains complex, as errors can occur in both the hardware and the software. Companies should therefore clearly define contractual liability arrangements with manufacturers and system integrators from the very beginning of humanoid robot deployment. [10]
How Humanoid Robots Work Technically
An understanding of the technical foundations of humanoid robots is essential for companies to realistically assess their potential. Humanoid robots are understood as versatile systems based on human movement mechanics and designed to respond to change in dynamic environments [11].
Hardware Components
The hardware of humanoid robots consists of several closely interconnected components. The mechanical framework consists of body structure, joints and actuators and forms the basis for movement sequences. Actuators function as drive elements and enable targeted movements of individual joints. Sensors and computing units are added to the system for real-time data processing and control. Only the interaction of these components enables the reliable operation of humanoid robots in real deployment areas [12].
Sensor Technology
The sensor technology of humanoid robots forms a central foundation for their functionality and can be divided into two categories: (1) proprioceptive sensors and (2) exteroceptive sensors.
- Proprioceptive sensors capture information from the interior of the system, such as joint position, velocity, or acceleration and are crucial for stability, balance and precise movement control.
- Exteroceptive sensors on the other hand receive information from the environment, such as cameras, LiDAR systems and tactile sensors.
Both sensor types together provide the data basis for tasks such as navigation, object recognition and manipulation [13].
Actuators and Movement Mechanics
Actuators are the muscles of humanoid robots; they convert electrical energy into targeted joint movements and determine how precisely and safely a system operates. Series Elastic Actuators (SEAs) absorb shocks and improve force control. Variable Stiffness Actuators (VSAs) dynamically adapt mechanical stiffness to the respective task. BLDC motors are additionally used for precise gripping and arm movements. [14]
Energy Supply
Energy supply is one of the key planning parameters in the practical deployment of humanoid robots. Current systems predominantly use lithium-ion batteries, whose operating time depends heavily on the deployment profile. Highly dynamic movement sequences and heavy payloads can significantly reduce runtime, while lighter service work enables several hours of operation. In shift operation scenarios, energy supply therefore remains critical. Solutions such as battery swap systems or solid-state batteries with higher energy density are under development. [15]
Software and AI
The hardware of a humanoid robot is only as powerful as the software that controls it. The software architecture determines how flexible, autonomous and capable of learning a system is in practice. Three layers are central:
- the middleware framework (ROS)
- AI models for perception
- motion planning
Robot Operating System (ROS)
The Robot Operating System (ROS) has established itself as the de-facto standard middleware in robotics. It is not a classical operating system, but rather a modular framework for coordinating distributed software components such as sensor systems, control units and actuator technology. With ROS 2, specific limitations of ROS 1 were addressed, including improved real-time capability, support for distributed systems and enhanced security mechanisms. The modular architecture enables the independent testing and replacement of individual components. [16]
AI Models for Perception
Modern humanoid robots use deep learning models for processing sensor data, particularly for visual perception, object recognition and scene understanding. Information from different sensor systems such as cameras and other environmental sensors is combined to generate a consistent picture of the environment. Learning-based cognitive architectures enable systems to more closely couple perception and decision-making. However, as autonomy and system intelligence increase, so do the requirements for robustness, reliability and traceability, particularly in industrial applications. [17]
Motion Planning
Motion planning determines how a robot safely and efficiently moves from one state to the next, taking into account obstacles and dynamic environmental changes. Classical methods such as the Zero-Moment-Point model (ZMP) or Model Predictive Control (MPC) are precise but computationally intensive. Learning-based approaches such as Reinforcement Learning (RL) and Imitation Learning are increasingly supplementing these methods. Robots learn movement strategies in a simulator and transfer them to the real world (Sim-to-Real Transfer). [18]
Challenges and Compliance
The deployment of humanoid robots not only brings technical potential, but also confronts companies with concrete challenges. Hardware-related conflicts of objectives, safety requirements in human-robot collaboration, IT infrastructure and economic viability must be taken into account from the very beginning.
Hardware Trilemma: Fine Motor Skills, Autonomy & Energy
Humanoid robots face a structural conflict of objectives between fine motor skills, autonomy and energy efficiency. High-precision gripping and movement sequences require powerful actuators and increase energy consumption. Additional computing power for perception and autonomous decision-making further burdens the battery. At the same time, the system must remain mechanically stable and balanced in order to operate safely in real, sometimes uneven environments. The energy systems available today significantly limit deployment time and make continuous shift operation difficult. For economical deployment, companies must therefore determine early on which of these dimensions will be prioritized for their application case. [19]
Safety First: Human-Robot Collaboration
Mobile humanoid robots place new demands on the safety architecture of industrial production environments. The standards ISO 10218-1/-2 and ISO/TS 15066 continue to form the basis for collaborative applications. Additionally, ISO 25785-1 is for the first time a standard in development that addresses safety requirements specifically for the industrial deployment of humanoid robots. Since there is no one-size-fits-all concept, a separate risk analysis must be carried out and a tailored safety concept developed for each deployment case, both technically and organizationally. [20]
IT Architecture: The Backbone of the Robot Fleet
Humanoid robots are networked data producers: cameras, LiDAR and AI models continuously generate massive data streams. Conventional Wi-Fi infrastructures reach their limits for safety-relevant robot control, as latency and availability are non-deterministic. Private 5G networks, on the other hand, enable low, predictable latencies in the single-digit millisecond range and are considered the preferred infrastructure for large-scale deployment. Edge computing additionally allows computationally intensive tasks to be processed locally directly in the production hall, reducing latency, bandwidth requirements and data protection risks. The IT and communications infrastructure is therefore a central prerequisite for the industrial deployment of humanoid robots. [21]
Ethical and Legal Aspects in Operation
The deployment of humanoid robots is not merely a technical decision, it also touches on day-to-day operations and the people within them. In Austria, the works council has a right to consultation and co-determination in the introduction of new technologies pursuant to the ArbVG and should be involved at an early stage. In Germany, the Works Constitution Act (BetrVG) similarly grants the works council a right of co-determination in the introduction of technical systems. At the EU level, the GDPR and the EU AI Act apply as soon as systems process personal data or are classified as high-risk AI. There is also the question: How do employees respond to machines that resemble them in movement and decision-making? In an industrial context, functionality is therefore deliberately prioritized over as realistic an appearance as possible. [22]
The Economics of Scaling: ROI Beyond Acquisition Costs
In addition to the technical and regulatory aspects, the key question for companies arises early on: When is the deployment of humanoid robots economically worthwhile and under what conditions? The decisive factor is not the purchase price alone – currently between 50,000 and 250,000 euros depending on the system – but rather the Total Cost of Ownership (TCO). This includes maintenance, software updates, infrastructure costs, training expenditure and downtime. A growing alternative model is Robotics-as-a-Service (RaaS). Instead of high capital expenditure (CapEx), companies pay a usage-based fee (OpEx). This lowers the entry barrier and makes humanoid robots accessible to medium-sized companies as well. ROI depends heavily on the deployment area; repetitive and physically demanding activities with high variance offer the greatest savings potential. [23]
Application Areas & Economic Viability: From the Shop Floor to the Value Chain
Industrial environments are currently the most realistic entry point for humanoid robots. They are particularly well suited for production environments that would be too complex or too costly to convert for conventional automation. While rigid automation solutions often require customized infrastructure, humanoid robots bring a decisive flexibility. They integrate into existing processes without having to redesign the shop floor. Within the value chain, the potential becomes most apparent where conventional automation reaches its limits.
Intralogistics and Assembly
In intralogistics and assembly, humanoid robots offer a decisive advantage over conventional Automated Guided Vehicles (AGVs). While AGVs depend on flat, marked paths, humanoid robots can climb stairs, navigate narrow corridors and operate in environments built for humans. Sorting and transport tasks that are too variable for rigid automation and too repetitive for skilled workers represent the ideal entry point. [24]
Dangerous Environments
The advantage of humanoid robots becomes clearer in environments associated with health risks for humans. Extreme temperatures, chemical exposure, confined spaces, or radiation exposure are conditions under which humanoid robots can take over maintenance and inspection tasks. Risk minimization for employees is not only a safety argument but is also gaining importance in the context of ESG strategies in significance. [25]
Healthcare and Service
In the healthcare and service sector, the potential of humanoid robots lies particularly in supporting and relieving staff from physically and organizationally demanding tasks. Studies and pilot applications, especially in East Asia, show that humanoid and socially interactive robots are already being used today for selected assistance and front-desk functions. The focus is less on full automation than on complementing human work through supportive and interactive systems. [26]
Pilot Projects in the Automotive Industry
The automotive industry is leading the way: BMW deployed Figure AI’s Figure 02 at its plant in Spartanburg, South Carolina. The task was to precisely remove sheet metal parts and position them for the welding process. Within ten months, the robot supported the production of over 30,000 BMW X3 vehicles, completed around 1,250 operating hours and moved more than 90,000 parts per shift. Since early 2026, the first European follow-up project has been running at the Leipzig plant [27].
Mercedes-Benz is simultaneously testing Apollo by Apptronik at the Digital Factory Campus in Berlin-Marienfelde. The robot is taking on intralogistics tasks there. It transports components to the production line and simultaneously conducts quality inspections [28].

The Business Case: Why Waiting No Longer Pays Off
The question is no longer whether humanoid robots can be economically viable, but rather under what conditions. To make the economic benefit tangible, the following scenario can be considered:
In final assembly, components must be repeatedly transported between two stations. Employees cover 30 to 60 meters per cycle, a repetitive task with high potential for interrupting value-adding activities. This is precisely where a humanoid robot can step in. It uses existing pathways and ramps, requires no infrastructure changes and takes over transport autonomously. The result: stabilized material flow, shorter waiting times and relieved employees who can focus on more complex tasks.
Compensating for the Skilled Worker Shortage
Humanoid robots are less an answer to the skilled worker shortage than to the demographic gap in repetitive, physically demanding activities. With an operating time of around 5,250 hours per year, a humanoid robot in Europe can replace between 1.6 and 7.9 full-time equivalents for transport tasks, depending on the system. This depends on the system, deployment profile and shift model. The payback period depends heavily on system price, labor costs and use case, and can be achieved in under two years depending on the configuration.
Automation of Complex Activities
Alongside costs, technical advancement is above all decisive. Modern AI models are increasingly enabling humanoid robots to perform variable tasks that are too complex for conventional automation. Unlike rigid industrial robots, they respond more flexibly, a clear advantage in dynamic production environments.
Market Radar: The Most Important Players Compared
The market for humanoid robots is developing rapidly, from research platforms to the first commercially deployable systems. For companies considering entry into the technology, a well-founded overview of the most important providers, their strengths and their maturity level is essential in order to make the right choice for each individual case.
Why It Matters Now: Future Ready Competitiveness
The automotive industry is under pressure: declining demand reduces capacity utilization, production networks are being consolidated and factory closures incur high costs. The need for flexible productivity solutions is growing.
Humanoid robots offer a concrete approach here: locations can increasingly be operated independently of local wage cost levels and reassessed in network decisions. Production capacities can be scaled flexibly without building rigid infrastructures. Restructuring costs can be reduced through targeted site transformations. In addition, intelligent systems make it possible to anchor critical manufacturing know-how within the company rather than losing it when experienced employees leave. Humanoid robots thus create not only operational efficiency but also the foundation for future-proof production structures.
Market Radar Humanoid Robots
This overview presents a selection of the most relevant humanoid robots and compares key performance parameters such as speed, battery life, and AI capabilities. It provides a concise insight into their technological maturity and different areas of application—from industrial use to scalable general-purpose systems.
| Robot | Manufacturer | Speed (m/s) | Battery (h) | AI (%) | Key Feature |
| Optimus | Tesla (USA) | 2.2 | 4 | 80 | Designed for mass production, FSD AI, Tesla ecosystem |
| Figure 02 | Figure AI (USA) | 1.2 | 5 | 90 | BMW partnership, multimodal AI, industrial use |
| Forerunner | Kepler Robotics (CHN) | 1.1 | 8 | 85 | 8h runtime, 8000N planetary roller actuators |
| Digit | Agility Robotics (USA) | 1.5 | 4 | 75 | Optimized for warehouse logistics, RaaS model |
| Apollo | Approtronik (USA) | 1.2 | 4 | 80 | Industrial focus, modular design, robust |
| Atlas | Boston Dynamics (USA) | 2.5 | 1 | 90 | Highest mobility, research & high-motion |
| Phoenix | Sanctuary AI (CAN) | 1.3 | 4 | 85 | Designed to handle multiple tasks instead of workers |
| G1 | Unitree (CHN) | 2.5 | 2 | 70 | Most affordable full humanoid, compact & foldable |
EFS Consulting Expert Outlook: What Does This Mean for Companies?
Humanoid robots are currently still in an early but technologically dynamic development phase. Questions around reliability, energy efficiency and scalability have not yet been conclusively resolved and therefore widespread industrial deployment is still pending [12]. However, first pilot projects from production and logistics show that the potential of the technology is real and not merely theoretical. [29]
The question therefore is no longer whether humanoid robots will come, but rather when and to what extent. Those who begin today to identify suitable processes, understand regulatory requirements and build the necessary internal know-how will gain a head start that will be difficult to make up later.
From this, important insights emerge from a business perspective: humanoid robots are not a short-term hype, but are also not yet a mature mass product. They are in a transition phase, with tangible application areas, growing investment interest and a regulatory environment that is gradually taking shape. For companies that want to remain competitive in the long term, it is worthwhile to actively accompany this transition rather than simply waiting.
Those who rely on an experienced partner can shape this process in a more targeted and efficient manner. EFS Consulting supports companies in following this development in a structured way, identifying relevant application areas and positioning themselves early, before others do.
EFS-Expertise: Why EFS Consulting is the Right Partner
Over 30 years of concentrated automotive know-how, developed through collaboration with leading OEMs and suppliers.
Cross-functional teams that not only design pilot projects but also reliably bring them to life.
Pragmatic, customer-oriented solutions, with the clear ambition of delivering measurable value quickly.
In the context of humanoid robots, a year of intensive market and technology engagement is added: a clear picture of the current challenges, a realistic view of solution paths and concepts that work under real conditions, not just in the laboratory.
EFS Consulting Services
EFS Consulting supports companies along a structured three-phase approach:
- Operational application areas are analyzed and the market is systematically assessed, from technical maturity and regulatory requirements to economic viability.
- Procurement preparation takes center stage: vendor selection, system requirements and organizational readiness.
- Translation of findings into a concrete pilot and implementation concept, tailored to the company’s specific production and logistics processes.
Conclusion
Humanoid robots are no longer a vision of the future – they are a technology currently making the leap from the laboratory into reality. Those who lay the right foundations today will shape this change rather than merely react to it. EFS Consulting accompanies companies on this journey: from initial orientation through the evaluation of concrete deployment scenarios to structured pilot planning. The next step is yours.
Contact EFS Consulting for a non-binding initial assessment and find out whether and where humanoid robots could already create concrete added value in your value chain today!
FAQs
What can humanoid robots do?
Transport, grip, inspect and perform simple assembly tasks, in environments built for humans.
Where are humanoid robots used?
Currently primarily in manufacturing and intralogistics. First pilot projects exist in automotive, warehousing and the service sector.
How expensive are humanoid robots?
Depending on the system, between 16,000 and 350,000 euros. Alternatively, RaaS models with monthly usage fees are available
References
[1] Publika, L. (2025, December 22). Leonardo da Vinci’s Robots and Their Modern-Day Influence. ARTpublika Magazine. https://www.artpublikamag.com/post/leonardo-da-vincis-robots-and-their-modern-day-influence
[2] PRAG BESUCHEN. (2025, December 30). Karel Capek.
https://www.prag-besuchen.de/persoenlichkeiten/karel-capek/
[3] (2024). THE HISTORY OF Humanoid ROBOTS IN 2024 – Ver 1.0. https://www.merphi.se/wp-content/uploads/2024/11/History-of-Humanoid-robots-poster_MERPHI_2024_Ver1.2.pdf
[4] IFR International Federation of Robotics. (2024). Industrial Robots – Definition. International Federation of Robotics
[5] IFR International Federation of Robotics. (2025). World Robotics 2025 report – SERVICE ROBOTS. World Robotics 2025 report – SERVICE ROBOTS – released by IFR – International Federation of Robotics
[6] Holland, O. (2016). How people perceive different robot types. IEEE International Conference on Robotics and Biomimetics (ROBIO) (PDF) How people perceive different robot types: A direct comparison of an android, humanoid, and non-biomimetic robot
[7] European Union. (2024). Regulation (EU) 2024/1689 laying down harmonised rules on artificial intelligence (Artificial Intelligence Act) Regulation – EU – 2024/1689 – EN – EUR-Lex
[8] International Organization for Standardization. (2025). Robotics – Safety requirements, Part 1: Industrial robots (ISO 10218-1:2025).ISO 10218-1:2025(en), Robotics — Safety requirements — Part 1: Industrial robots
International Organization for Standardization. (2025). Robotics – Safety requirements, Part 2: Industrial robot applications and robot cells (ISO 10218-2:2025). ISO 10218-2:2025(en), Robotics — Safety requirements — Part 2: Industrial robot applications and robot cells
[9] European Union. (2023). Regulation (EU) 2023/1230 of the European Parliament and of the Council. Regulation – 2023/1230 – EN – EUR-Lex
[10] European Parliament and Council of the European Union. (2024). Directive (EU) 2024/2853 Richtlinie – 2024/2853 – EN – EUR-Lex
[11] IFR International Federation of Robotics. (2025) Humanoid robots: “Vision and reality”. Humanoid Robots: “Vision and Reality” Paper Published by IFR – International Federation of Robotics
[12] PubMed Central. (2023). Opportunities challenges and roadmap for humanoid robots in construction. Opportunities challenges and roadmap for humanoid robots in construction – PMC
[13] Roychoudhury et al. (2023). Perception for humanoid robots: A review. Perception for Humanoid Robots | Current Robotics Reports | Springer Nature Link
[14] Advancements in Humanoid Robots: A Comprehensive Review and Future Prospects
[15] Opportunities challenges and roadmap for humanoid robots in construction – PMC
[17] Advancements in Humanoid Robots: A Comprehensive Review and Future Prospects
[18] Advancements in humanoid robot dynamics and learning-based locomotion control methods
[19] Opportunities challenges and roadmap for humanoid robots in construction – PMC
[20] ISO/TS 15066:2016 – Robots and robotic devices — Collaborative robots
[21] Connected vehicles’ dynamic route planning based on reinforcement learning – ScienceDirect
[22] A&W-Blog | künstliche Intelligenz im Betrieb – Arbeit&Wirtschaft Blog
[23] Humanoid Robot ROI Guide [2026]
[25] Opportunities challenges and roadmap for humanoid robots in construction – PMC
[26] An Introduction to Robots and Artificial Intelligence for Healthcare in Japan and South Korea
[27] BMW Group to deploy humanoid robots in production in Germany for the first time
[29] Tong, Y., Liu, H., & Zhang, Z. (2024). Advancements in Humanoid Robots: A Comprehensive Review and Future Prospects. https://www.scribd.com/document/727344087/Advancements-in-Humanoid-Robots-A-Comprehensive-Review-and-Future-Prospects

Authors